
Digitalización 3D

Existen distintos sistemas de digitalización 3D, que principalmente se pueden dividir en dos grandes grupos: sistemas con contacto o sin contacto con el objeto a digitalizar.
Digitalización por contacto
En la actualidad existen cabezales de digitalización en continuo (SP 600 de Renishaw, ver foto). La velocidad de adquisición de datos se incrementa notablemente respecto a los cabezales convencionales, ya que éstos no se separan de la superficie a digitalizar.
Otro tipo de sistema de digitalización 3D con contacto son los brazos articulados de operación manual. Estos poseen una elevada precisión; pero por el contrario tienen una velocidad de adquisición de datos muy baja, ya que se necesita llevar manualmente la punta a cada punto que se quiera digitalizar, con lo cual la digitalización de un objeto de tamaño medio resulta muy costosa.
Para emplear estos sistemas por contacto, se necesita que las piezas tengan la rigidez suficiente para que no se deformen con contacto de la punta y debido a la geometría de las puntas, es imposible digitalizar algunas ranuras y ángulos interiores; pero poseen una elevada resolución.
Digitalización sin contacto
Técnicas de visión pasiva
Este principio general puede mejorarse con modelos de cámaras más elaborados o utilizando más de dos cámaras, lo que se conoce con el nombre de fotogrametría. La visión estereoscópica presenta el interés de poder dar la posición en 3D de puntos sobre las superficies independientemente de la iluminación específica (visión pasiva).

Técnicas de visión activa
Estos sistemas ópticos constan siempre como mínimo de un emisor de luz y un receptor. Conociendo la dirección del rayo emitido y la del recibido se obtienen las dimensiones del triángulo formado y por lo tanto obtener la profundidad del punto inspeccionado.
Existen tres tipos de sistemas ópticos:
2.1. Digitalización por láser
La fuente de luz en estos sistemas es un láser de diodos. Dicho láser proyecta una línea de luz sobre la superficie que vamos a digitalizar. La luz reflejada será detectada por uno o dos células fotosensibles que se encuentran situadas a ambos lados del láser. Estos detectores leen el haz de luz reflejado y transmiten la información obtenida sobre el perfil de la pieza a un software. El resultado de la digitalización nos da la posibilidad de realizar una ingeniería inversa, es decir, obtener la geometría completa de la pieza prescindiendo de los planos.
En este sistema el emisor es un proyector de luz blanca y el receptor una cámara CCD.
Cuando se inicia una digitalización el proyector lanza sobre el objeto una serie de franjas de luz verticales de claros y sombras alternadas, que son registradas por la cámara. Para obtener las coordenadas de los puntos digitalizados por triangulación, matemáticamente se podía decir que el sistema proyector es un emisor de planos de luz y la cámara CCD un receptor de líneas rectas. El cálculo de la profundidad consiste en resolver las intersecciones plano-recta.
2.3. Telemetría
La telemetría consiste en medir el tiempo de recorrido de un rayo luminoso (láser) hasta la superficie de medida. Se puede medir de dos formas (con la medida del tiempo de vuelo o por el cálculo por diferencia de fase). En el primer caso los datos se obtienen midiendo el tiempo entre la emisión del impulso luminoso y la observación del retorno. En el segundo se regula el impulso luminoso siguiendo una frecuencia de terminada y se mide el desfase entre el rayo emitido y la luz retornada.
El proceso de ingeniería inversa
a) Digitalización de la Pieza
- Definición de los parámetros de trabajo.
- Selección de la lente adecuada, dependiendo del tamaño y geometría de la pieza y de la precisión requerida.
- Ajuste de la potencia del láser para que el haz refleje correctamente sobre la superficie de la pieza.
- Colocación de la pieza.
Con el escáner 3D se realizan barridos del objeto desde diversos puntos de vista. Cada barrido da lugar a un mapa de profundidad (range map) de la zona visible para el aparato, y asocia cada punto captado con información sobre los colores.
Estos mapas de profundidad son tratados para eliminar las zonas con defectos o elementos ajenos a la pieza.
Los diferentes mapas son transformados en mallas de triángulos (mesh).
Se alinean las distintas mallas y se acoplan para obtener un solo modelo de triángulos 3D.
Se necesitan operaciones de edición para corregir pequeños errores, simplificar datos redundantes y suavizar la malla.
Una vez optimizada la malla se puede exportar a un fichero STL (para la realización de un prototipo o continuar con el proceso de ingeniería inversa).
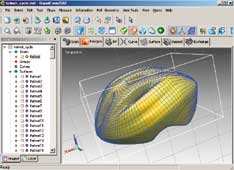
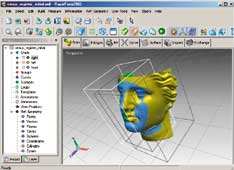
El RapidForm permite obtener superficies NURBS a partir de la malla de triángulos 3D.
La manera de hacerlo es mediante la creación de cuatro curvas sobre la malla que encierren un área cerrada, y la posterior construcción de la superficie NURBS definida dentro de la misma y aproximándose a dicha malla.
Las superficies obtenidas deben ser lo más parecidas posibles a la malla de triángulos 3D, para ello se realiza una verificación del error cometido al aproximar la superficie al modelo en triángulos.
Con la adquisición del Digitalizador Láser y el software de tratamiento de nubes de puntos, junto con el cabezal de palpación en continuo Renishaw SP 600, AIJU presta una serie de nuevos servicios que pretenden resolver los problemas de las empresas moldistas, maquetistas y transformadoras de plásticos, proporcionando un servicio completo e idóneo que se adapta a las necesidades tecnológicas del mercado. Por ello, los servicios de digitalización incluyen:
- Obtención del modelo en la malla de polígonos para la realización de prototipos, catálogos 3D, etc.
- Extracción de curvas.
- Obtención del modelo en superficies.
- Ingeniería inversa del modelo.
- Control dimensional de la pieza mediante comparación con fichero CAD.













")

















