
Soluciones de seguridad para la colaboración inteligente hombre-robot
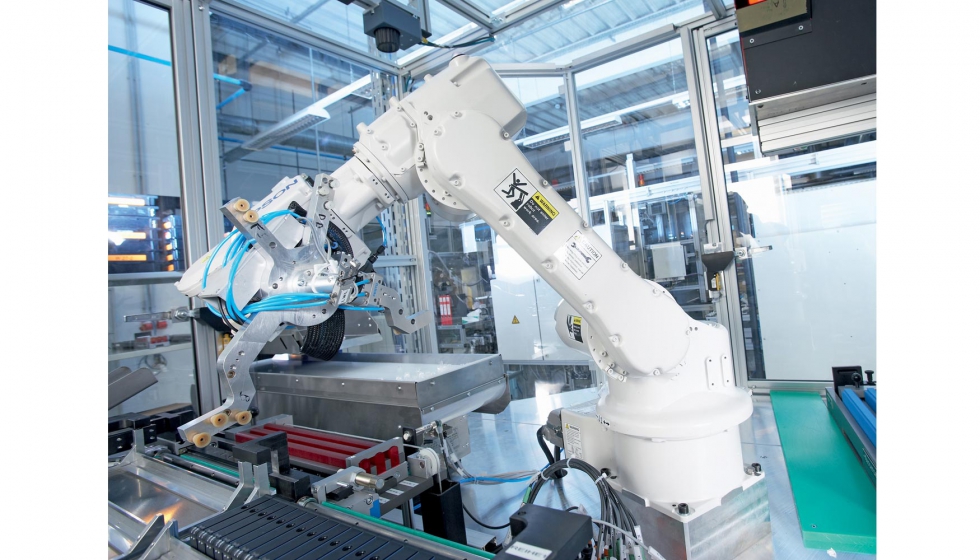
Uno de los grandes temas de la Industria 4.0 es la flexibilización de los procesos de trabajo; una flexibilización que, en casos extremos, llega a la fabricación de productos de tamaño de lote 1 en las condiciones industriales de fabricación en masa, es decir, como producto único de la cadena de producción. En una fábrica inteligente de este tipo, en la que productos y procesos se fusionan con las modernas tecnologías de comunicación e información, se usan máquinas cada vez más inteligentes y, por tanto, más autónomas. Paralelamente, la fabricación industrial también registra un aumento de la interacción entre el hombre y la máquina, pues la combinación de las capacidades humanas con las de los robots propone soluciones de fabricación con ventajas tales como ciclos de trabajo optimizados, mayor calidad y mejor relación coste-eficacia. Al mismo tiempo, las máquinas autónomas y, especialmente, aquellas que interactúan con el hombre, requieren conceptos de seguridad que flexibilicen de forma eficaz los procesos de producción.
Interacción hombre-robot: una cuestión de tiempo y de espacio
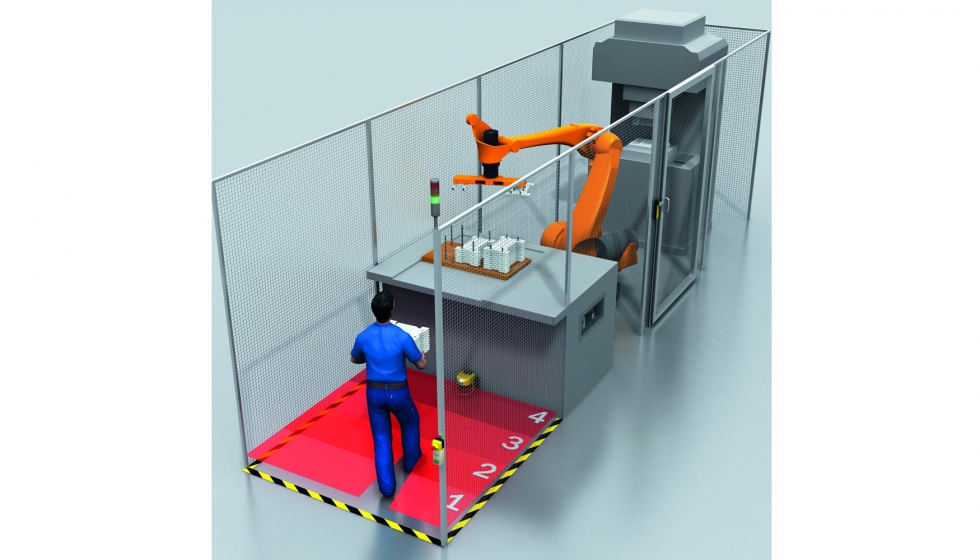
No ha sido hasta la llegada de la Industria 4.0 que la interacción colaborativa entre las personas y las máquinas ha pasado a ser el foco de la automatización industrial. Antes, hasta el 90% de las interacciones venían regidas por dos escenarios: el de la coexistencia y el de la cooperación. En este contexto, el tiempo y el espacio son los parámetros básicos de interacción. Una situación de trabajo en la que el hombre y la máquina permanecen al mismo tiempo durante la interacción en zonas colindantes se denomina coexistencia. Un ejemplo típico de coexistencia sería una estación alimentadora con mesa giratoria en una cabina robotizada. El hombre y la máquina trabajan al mismo tiempo en áreas vecinas cuya zona de paso se supervisa, por ejemplo, con una cortina fotoeléctrica de seguridad deTec4 Prime. Una interacción en la que el usuario y la máquina comparten una zona de trabajo común, pero trabajan en ella en tiempos diferentes, cumple las condiciones de una cooperación. Una situación de trabajo de este tipo se daría, por ejemplo, en una estación de transferencia de un robot de montaje. Un operario coloca una pieza de trabajo al mismo tiempo que, por ejemplo, un escáner láser de seguridad S3000 con varios campos de protección simultáneos que detectan al operario reduce la velocidad del robot o detiene su movimiento con seguridad supervisada.
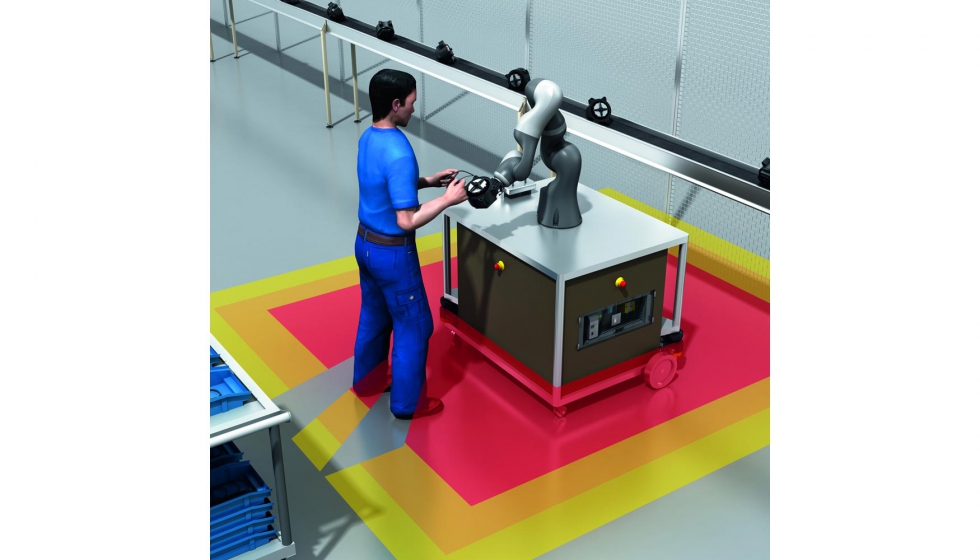
En el marco de la Industria 4.0, una tercera forma de interacción cobra cada vez mayor protagonismo: la colaboración hombre-robot. En este tipo de interacción, ambos comparten simultáneamente la misma zona de trabajo. Un ejemplo de ello es una plataforma móvil con un robot que coge piezas de una cinta o de un palé y, después de transportarlas a una estación de trabajo, las presenta y entrega al operario allí presente. En estos escenarios de colaboración ya no son suficientes las soluciones de detección clásicas seguras de coexistencia y cooperación; ahora, las fuerzas, las velocidades y las rutas de tránsito de los robots deben supervisarse, limitarse y, si es necesario, detenerse en función del grado de peligro real, lo que hace que la distancia entre el hombre y el robot se convierta en el parámetro de seguridad decisivo.
La evaluación de riesgos como punto de partida, también en los cobots
Ninguna colaboración hombre-robot es igual a otra, por lo que es necesario realizar una evaluación de riesgos individual de la aplicación CHR incluso cuando el robot utilizado haya sido desarrollado expresamente para la interacción con el hombre; de ahí que el rebautizado cobot presente, ya desde el diseño básico, una gran variedad de características de construcción con seguridad intrínseca. Al mismo tiempo, el espacio de colaboración está sujeto a ciertos requisitos básicos, como son unas distancias mínimas a las zonas limítrofes accesibles con riesgos de aplastamiento o atrapamiento. La base normativa de la seguridad funcional de las aplicaciones CHR se nutre, por una parte, de normas generales como la IEC 61508, la IEC 62061 y la ISO 13849-1/-2; por otra, deben tenerse en cuenta, además, la ISO 10218-1/-2 relativa a la seguridad para robots industriales y, especialmente, la ISO TS 15066 sobre robots colaborativos. Los desarrolladores e integradores de sistemas robóticos deben no solo comprobar esmeradamente que las medidas constructivas de protección previstas por el constructor del robot sean conformes con las normas y funcionen correctamente, sino también tener en cuenta los posibles peligros y riesgos residuales. A este respecto, debe realizarse una evaluación de riesgos del sistema robótico, sus secuencias de movimiento y la zona de colaboración prevista, según EN ISO 12100, con el fin de extraer de los resultados de dicha evaluación las correspondientes medidas de seguridad; por ejemplo, la implementación del modo de colaboración adecuado, según ISO/TS 15066.
Modos de funcionamiento de seguridad de los sistemas robóticos colaborativos
Según esta especificación técnica, es posible diferenciar entre cuatro modos de funcionamiento colaborativo. El modo Parada segura monitorizada detiene el robot para interactuar con el hombre; en el modo 'Guiado manual', la colaboración hombre-robot se garantiza guiando el robot manualmente y de forma consciente con velocidad reducida segura. En el tercer modo de colaboración, 'Limitación de fuerza y potencia', la seguridad requerida se alcanza reduciendo la fuerza, la potencia y la velocidad del robot (por ejemplo, mediante funciones de limitación del controlador de seguridad) a un límite de carga biomecánico en el que no sea de esperar ningún riesgo o lesión. Esto será así independientemente de si el contacto físico entre el robot y el hombre se produce de forma prevista o imprevista.
El modo de colaboración Supervisión de velocidad y distancia adquiere todo su sentido en escenarios de trabajo en los que se requiere gran flexibilidad y, por tanto, en la Industria 4.0 y en los procesos de producción de la fábrica inteligente. Este modo se basa en que la velocidad y la ruta de tránsito del robot se supervisan y se adaptan en función de la velocidad de trabajo del operador en la zona protegida de colaboración. En este modo de funcionamiento, las distancias de seguridad se supervisan de forma continua y el robot se ralentiza, se detiene o modifica su ruta de tránsito si es necesario. Cuando la distancia entre el operador y la máquina es otra vez superior a la distancia mínima, el sistema robótico puede continuar sus movimientos automáticamente a la velocidad y por la ruta de tránsito habituales. De esta manera, la productividad del robot se restablece inmediatamente.
Seguridad funcional para la colaboración hombre-robot: experiencia, gama de productos e implementación de un solo proveedor
De los diferentes modos de colaboración especificados en la norma ISO/TS 15066, el de supervisión de la velocidad y la distancia es el que ofrece las mayores perspectivas en aplicaciones de colaboración hombre-robot. En comparación con estos modos, pero también en el contexto de los aún predominantes escenarios de interacción de coexistencia y cooperación, se aprecia claramente que la tecnología de sensores y de control orientada a la seguridad tiene que enfrentarse a nuevos retos para que la colaboración hombre-robot se desarrolle sin contratiempos. A esto hay que añadir que los requisitos de seguridad de la zona de trabajo común utilizada son mayores cuanto mayor sea el grado de colaboración de las futuras situaciones de trabajo. Sick, en su calidad de fabricante de soluciones de sensores, de control y de sistemas para la seguridad funcional, y como proveedor de servicios integrales de seguridad desde la evaluación de riesgos y el concepto de seguridad hasta la implementación de la solución de sistema cuenta en este sentido con una amplia experiencia en el diseño de aplicaciones robóticas seguras. Dispone, además, de una gama de sensores y de productos de control que a lo largo de varias décadas ha ido evolucionando con los requisitos de aplicaciones robóticas seguras. Con las cada vez más inteligentes soluciones de seguridad basadas en diferentes tecnologías no dejan de surgir aplicaciones de colaboración hombre-robot capaces de satisfacer requisitos cada vez más exigentes.
La colaboración hombre-robot representa actualmente solo un pequeño porcentaje de todas las aplicaciones con interacción hombre-máquina. Las soluciones innovadoras para la seguridad funcional de las aplicaciones robóticas, como Sick las desarrolla e implementa, pueden contribuir a aumentar de modo significativo este porcentaje en un futuro cercano.

















