
La IA Física impulsa la nueva generación de robots autónomos
La IA Física es un término que está de moda, y no es para menos por lo que nos aporta. Desde Nvidia nos dicen que Physical AI is unlocking new capabilities that will transform every industry; pero no solo en la industria, en todas las áreas donde se disponga de una máquina mecatrónica, debido a que la IA Física nos permite dar el paso evolutivo donde la IA deja de vivir en el software y empieza a actuar físicamente sobre el entorno.
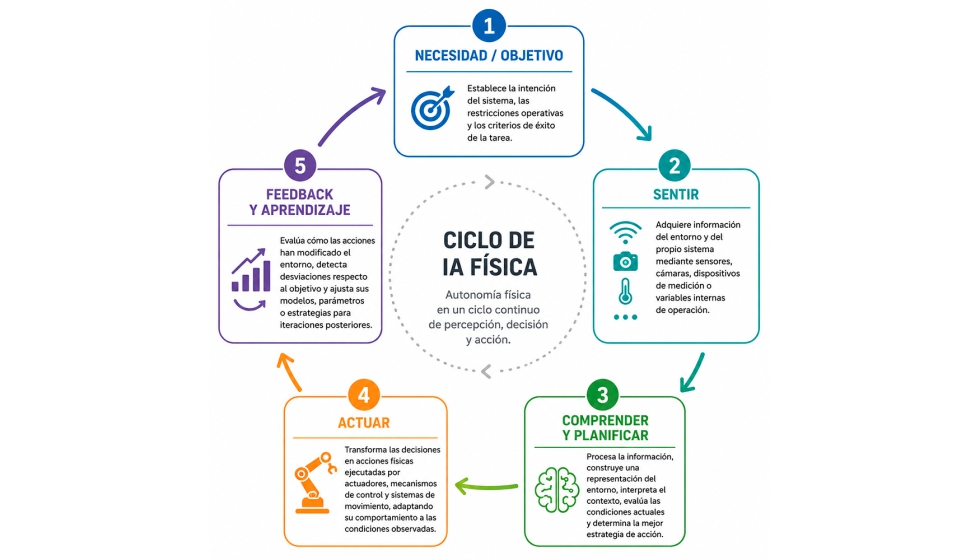
¿Pero qué es en realidad? La IA Física puede entenderse como un ciclo continuo de autonomía física mediante el cual un sistema inteligente interactúa con el entorno para cumplir un objetivo definido.
La IA Física permite que los robots ejecuten tareas de forma más eficiente al optimizar sus trayectorias y decisiones en tiempo real; esto se traduce en movimientos más suaves y precisos, menor consumo energético, reducción del tiempo de operación y un menor desgaste mecánico, lo que incrementa la vida útil de los equipos.
El proceso de cada interacción sería:
1. Necesidad u objetivo, establece la intención del sistema, las restricciones operativas y los criterios de éxito de la tarea.
2. Sentir, permite adquirir información del entorno y del propio sistema mediante diferentes fuentes de percepción, como sensores, cámaras, dispositivos de medición o variables internas de operación.
3. Comprender y planificar, es donde la información es procesada para construir una representación del estado del entorno, interpretar el contexto, evaluar las condiciones actuales y determinar la estrategia de acción más adecuada para alcanzar el objetivo.
4. Actuar, se transforma dichas decisiones en acciones físicas ejecutadas por actuadores, mecanismos de control y sistemas de movimiento, adaptando su comportamiento a las condiciones observadas.
5. Feedback y aprendizaje, fase en la que el sistema entra en un proceso de retroalimentación, evaluando cómo sus acciones han modificado el entorno, detectando desviaciones respecto al objetivo y ajustando sus modelos, parámetros o estrategias para iteraciones posteriores.
Este esquema conforma un ciclo cerrado, dinámico y adaptativo, donde percepción, razonamiento y acción se retroalimentan continuamente, constituyendo uno de los principios fundamentales de la IA Física: la capacidad que tiene el sistema en cada acción que ejecuta.
Para poder llegar a este momento tecnológico, en el que es posible desarrollar proyectos de IA Física, ha sido necesario avanzar significativamente en cuatro grandes áreas:
1. Sensórica avanzada, IoT y visión artificial: se requería que las máquinas realmente pudieran percibir el entorno; es decir, que evolucionaran desde sistemas puramente mecatrónicos hacia plataformas capaces de integrar múltiples fuentes de detección. Estos mecanismos de percepción debían dejar de ser puntuales o aislados y pasar a proporcionar una caracterización continua y dinámica del estado del entorno y del propio sistema.
2. Machine Learning, especialmente en el ámbito del aprendizaje profundo y el aprendizaje por refuerzo: no basta con que un sistema pueda ejecutar una tarea de forma predefinida; es necesario que posea la capacidad de adaptarse a variaciones en los parámetros del proceso, gestionar incertidumbres y responder a eventos del entorno que obliguen a modificar la acción, manteniendo el cumplimiento del objetivo establecido.
3. Gemelos digitales y modelos del mundo (World Models): el desarrollo de sistemas de IA Física requiere un volumen muy amplio de entrenamiento, múltiples variables y una gran cantidad de iteraciones. Esto solo resulta viable mediante la simulación del sistema físico y de su entorno en un gemelo digital, permitiendo ejecutar miles de ciclos bajo diferentes condiciones para que el sistema pueda comprender, actuar, optimizar su comportamiento y aprender de forma eficiente. Como resultado de este proceso, el sistema desarrolla una representación interna del entorno y de la dinámica del proceso, conocida como World Model o modelo del mundo, que le permite estimar el estado actual del entorno, anticipar posibles cambios y evaluar las consecuencias de sus acciones antes de ejecutarlas físicamente.
4. Computación de alto rendimiento en el borde (Edge AI Computing): la IA Física está concebida para operar en sistemas autónomos que, en muchos casos, son móviles y deben tomar decisiones en tiempo real. Esto implica disponer de una capacidad de procesamiento suficiente para ejecutar modelos de inteligencia artificial, algoritmos de percepción, planificación y control directamente en el propio dispositivo, sin depender continuamente de servicios externos o de la nube. Para lograrlo, ha sido necesario el desarrollo de plataformas de computación cada vez más potentes, compactas y energéticamente eficientes, capaces de ofrecer un elevado rendimiento de cálculo en espacios reducidos y con consumos compatibles con los requisitos de autonomía, movilidad y operación continua de los sistemas físicos inteligentes.
Una vez comprendidos los fundamentos de la Physical AI y las tecnologías que la hacen posible, podemos analizar cómo esta representa un paso evolutivo hacia la autonomía en las aplicaciones robóticas.
Tradicionalmente, la programación de robots industriales se ha basado en la definición de ciclos operativos que establecen la secuencia ideal de acciones necesarias para ejecutar una tarea de forma óptima. Posteriormente, mediante metodologías de análisis como Gemma, Amef y otras técnicas de evaluación de riesgos, se identifican los posibles escenarios de fallo y se desarrollan las condiciones, respuestas y estrategias necesarias para que el sistema pueda afrontarlos.
Sin embargo, este enfoque presenta una limitación fundamental: el robot únicamente puede responder a aquellas situaciones que han sido previamente analizadas y programadas. Cuando se enfrenta a una condición no contemplada, el comportamiento habitual consiste en detener la operación de forma segura para evitar daños al proceso, al equipo o a las personas. Como consecuencia, siempre existe un grado de incertidumbre asociado a situaciones imprevistas que escapan a la lógica predefinida del sistema.
La IA Física introduce un nuevo paradigma. Gracias al uso de modelos de aprendizaje, simulación avanzada y entrenamiento en múltiples escenarios, el sistema puede desarrollar la capacidad de interpretar situaciones no previstas explícitamente durante la programación. En lugar de depender exclusivamente de reglas predefinidas, el robot es capaz de percibir el estado del entorno, comprender el contexto, evaluar alternativas y seleccionar la acción más adecuada para alcanzar el objetivo establecido, incluso ante variaciones o incidencias no contempladas inicialmente.
Para ilustrar este concepto, consideremos el caso de un brazo robótico encargado de dispensar cerveza. El objetivo es sencillo: servir correctamente una cerveza en un vaso minimizando derrames y garantizando la cantidad y calidad del servicio. Sin embargo, durante la operación pueden aparecer múltiples variables que afectan al resultado final, como variaciones en el caudal de la cerveza, una cantidad excesiva de espuma, una sujeción incorrecta del vaso o desviaciones en el volumen servido.
El siguiente diagrama muestra cómo la IA Física participa en el ciclo de dispensado. A través de un proceso continuo de percepción, comprensión, planificación, acción y retroalimentación, el sistema adapta su comportamiento a las condiciones reales del entorno y corrige dinámicamente su estrategia para alcanzar el resultado esperado. De este modo, el brazo robótico puede operar de forma más autónoma, robusta y eficiente, entregando al cliente un vaso con la cantidad de cerveza adecuada y en las condiciones deseadas.

Aunque se ha utilizado el ejemplo del dispensado de cerveza por tratarse de una situación sencilla y fácilmente comprensible, este mismo enfoque puede aplicarse a innumerables procesos industriales. Operaciones como el ensamblaje de componentes, la manipulación de materiales, la clasificación de productos, el almacenamiento automático o la logística inteligente pueden beneficiarse de sistemas capaces de adaptarse a cambios en el entorno, gestionar incertidumbres y tomar decisiones autónomas. En este sentido, la IA Física constituye uno de los pilares fundamentales para la evolución de la robótica desde la automatización tradicional hacia sistemas verdaderamente autónomos.
Hasta el momento, en el mundo industrial manejábamos el término de autonomía a la capacidad de moverse hasta el siguiente punto de recarga o evaluación porque solo podríamos evaluar la autonomía desde el punto de vista energético. Ahora podemos ampliar la visión a la toma de decisión y entender que la autonomía real no es cuánto tiempo el robot puede moverse, sino cuánto puede comprender y adaptarse al mundo físico.
Sobre el autor
Alejhandro Navarro es ingeniero mecánico con posgrados en Mecatrónica y Dirección de Proyectos. Tras más de 20 años desarrollando proyectos industriales en robótica y automatización principalmente en automoción e I+D+i, en los últimos años ha enfocado su experiencia hacia un nuevo reto: llevar la robótica fuera de la fábrica y acercarla a entornos reales de consumo.
Actualmente, lidera el desarrollo de soluciones robóticas autónomas y colaborativas para aplicaciones como dispensado de bebidas, alimentación y otros servicios 24/7, con un enfoque claro en adaptabilidad, eficiencia y escalabilidad.
Navarro es autor del libro Robot Industrial, Manual de Instalación, publicado por la editorial Paraninfo.




































