
Plataforma de realidad virtual multicapa para el control de infraestructuras subterráneas. Toma de datos mediante drones
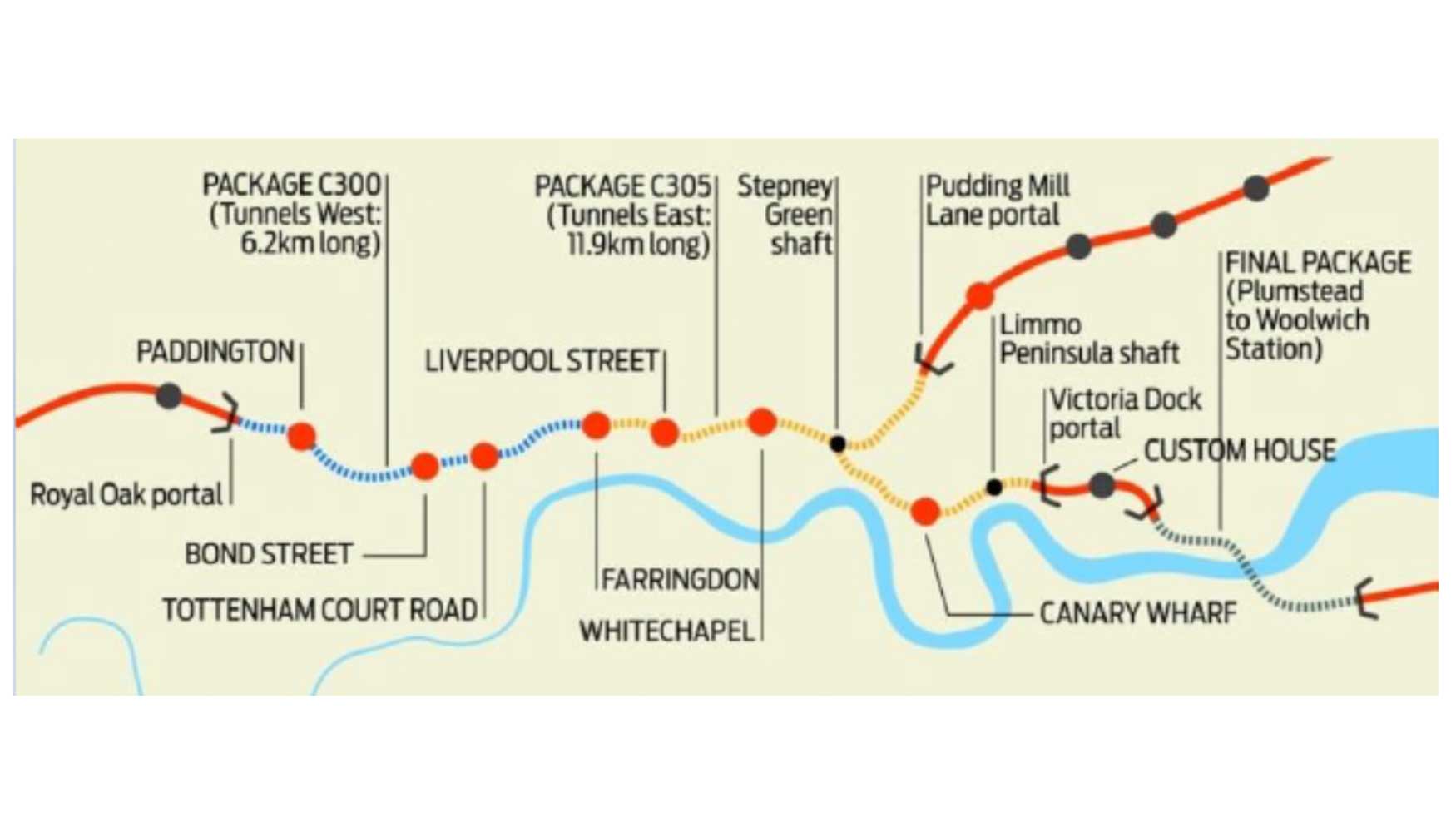
El origen de la plataforma PLAMIS arranca dentro de uno de los proyectos de infraestructuras más grandes de su clase en Europa, Crossrail: se han construido 42 km de túneles, 10 nuevas estaciones y 30 se han remodelado y adaptado para la nueva Elizabeth Line que abrirá en 2018.
Geocisa, en colaboración con Dragados, trabajó durante 2015 y 2016 en el desarrollo de un elemento que incorporara un valor añadido al paquete de información generada en la fase constructiva, dentro del contrato de túnel ejecutado por Dragados. De ahí nació la idea de la plataforma PLAMIS.
Equipo de trabajo
Geocisa es una empresa altamente especializada en diversas actividades de Tratamientos de terreno, Cimentaciones, Ingeniería del terreno, Instrumentación de obras, Laboratorios, Gestión de infraestructuras, Conservación de carreteras, Restauración de monumentos, puentes y edificios singulares y Actuaciones medioambientales.
En particular, este proyecto fue coordinado por el departamento de Instrumentación y seguimiento de obras, que cuenta con más de 20 años de experiencia en el control de toda clase de infraestructuras. Para ciertas partes del proyecto, como el desarrollo de la plataforma de realidad virtual, el diseño y producción del prototipo de dron aéreo y el modelado de proyecto, Geocisa contó con la colaboración de empresas punteras y especialistas en cada una de estas ramas.
Objetivos del proyecto
Abordamos el proyecto con un objetivo doble:
1.- Desarrollo de una plataforma multicapa de realidad virtual como un medio más eficiente de compilar y entregar la información generada durante el proceso constructivo o de mantenimiento.

Esta plataforma consta de:
a) Una primera capa consistente en un modelo de nube de puntos.
b) Segunda capa, un modelo de fotogrametría.
c) Tercera capa, un modelo BIM generado con la información durante el proceso constructivo.
2.- Buscar una alternativa a la toma de datos cuando las restricciones de acceso y tiempo no permiten usar equipos tradicionales.
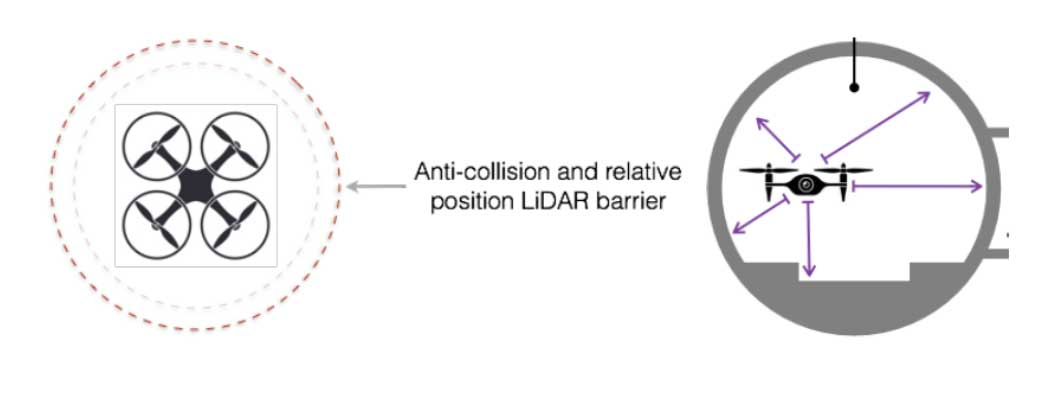
Por este motivo nos declinamos por el uso de un dron aéreo. Este dron está provisto de una tecnología especialmente desarrollada para este tipo de entornos, con lo que le permite volar en modo semiautomático sin necesidad de señal GPS.
Toma de datos - Caso real
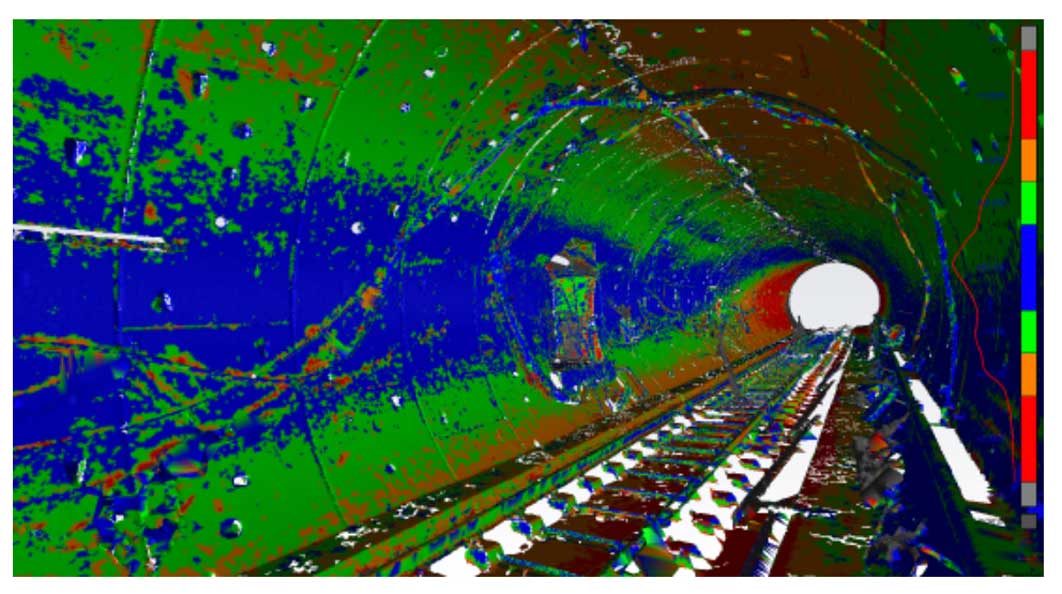
Para la toma de datos se eligió una sección de túnel de 50 metros. Primero se llevó a cabo un escaneo del tramo de túnel usando un scanner fijo de alta precisión modelo Leica P40. Como resultado de este trabajo obtuvimos una nube de puntos, que formaría la primera capa de nuestra plataforma y nos serviría para comparar con la nube de puntos obtenida usando el dron aéreo.

Posteriormente usando el dron aéreo en modo semiautomático se tomó la fotogrametría que forma la segunda capa de nuestra plataforma.

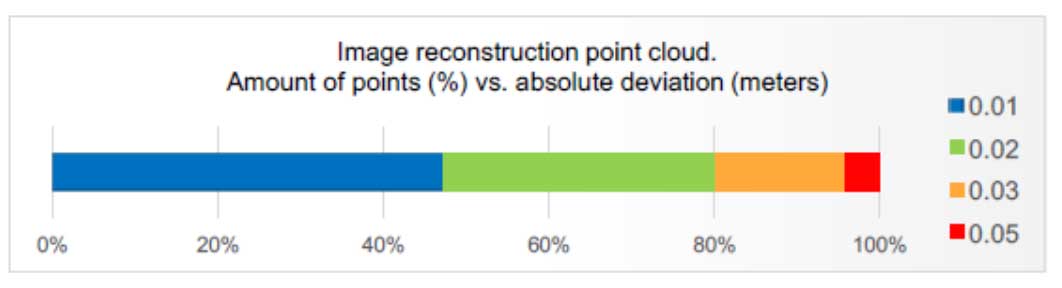
A partir de esta fotogrametría obtenida con el dron, se generó una nube de puntos que comparamos con el resultado del escáner fijo. Más del 90% de los puntos de esta nube obtenida con el dron tenían una desviación inferior a los dos centímetros.
Por tanto, como conclusión podemos decir que la toma de datos mediante la plataforma aérea es una decente alternativa, en resolución y precisión, a los métodos tradicionales, y que supone una clara mejora en cuanto a la reducción de riesgos y consumo de recursos.
Plataforma desarrollada PLAMIS
El prototipo final de nuestra plataforma multicapa puede ser mostrado en un equipo de altas prestaciones. Para el proyecto elegimos el hardware HTC Vive.

PLAMIS permite acceso en tiempo real al modelo BIM, la nube de puntos y los datos de la fotogrametría.

Además incluye diferentes opciones de modo de visualización para el usuario:
- Opción de desplazarse por la vista (MOVE) o tele transportarse (Teleport).
- Una tablet virtual que permite al usuario, interactuar con la plataforma.
- Un teclado virtual.
- Un menú contextual que puede ser utilizado dentro del espacio 3D.
- Asociar datos del modelo BIM con la nube de puntos/fotogrametría.
- Realizar mediciones, anotaciones y tomar fotos de alta resolución.
- Grabar y almacenar sesiones.
- Insertar y mover objetos dentro de las vistas.





















































")




















