
Yaskawa Ibérica, S.L.U. - Robots para otras aplicaciones específicas
Motoman Total Solution con Air Grip
Celda con pinza para manipulación de botellas: solución completa para packaging
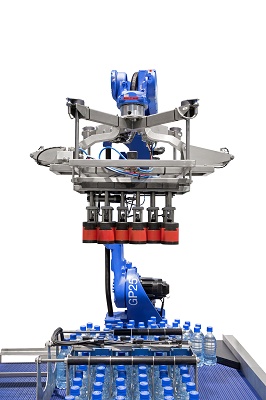
Air Grip es una solución patentada por Yaskawa cuya función específica es la manipulación de botellas de bebidas a base de robots. Esta pinza de botella para los robots Motoman es eficiente, rápida, segura y flexible y con ella es posible manejar hasta 47.000 botellas/hora con solo dos robots. Una de las principales características de Air Grip es la gran capacidad de producción que tiene sin problemas, con paradas mínimas y una baja presión de aire requerida.
La solución Air Grip ha sido desarrollada para satisfacer las demandas de una aplicación flexible en plantas embotelladoras. Y se puede utilizar tanto en pequeñas como en grandes empresas y para una gran variedad de propósitos. Es fácil de usar, cuenta con una larga vida útil y es capaz de manejar la mayoría de los tipos de botella y bandejas de plástico o vidrio. Además, su producción se puede ajustar fácilmente a las diferentes demandas del mercado y cumple con los altos estándares de fiabilidad de la producción.
Los puños de la pinza de botella Air Grip están diseñados en cinco tamaños estándar que cubren la mayor parte del surtido actual de botellas. Estos puños fuertes y robustos aseguran un agarre seguro en los cuellos de las botellas, incluso en aplicaciones de alta velocidad, sin dañar las tapas de rosca.
Esta aplicación se presenta en una celda “Total Solution” de Yaskawa, una solución completa para packaging que integra la última tecnología de todas las divisiones de la compañía: incluye un PLC Yaskawa, variadores de la gama GA700 con conexión bluetooth y capacidad de programación, software Motologix para programar el robot desde diferentes tipos de PLC y robot GP25 de la gama de manipulación GP, el controlador YRC1000, el cual lleva integrado la Unidad de Seguridad Funcional (FSU) que permite controlar hasta 32 posiciones de seguridad para limitar la posición del robot así como su velocidad.
La solución Air Grip ha sido desarrollada para satisfacer las demandas de una aplicación flexible en plantas embotelladoras. Y se puede utilizar tanto en pequeñas como en grandes empresas y para una gran variedad de propósitos. Es fácil de usar, cuenta con una larga vida útil y es capaz de manejar la mayoría de los tipos de botella y bandejas de plástico o vidrio. Además, su producción se puede ajustar fácilmente a las diferentes demandas del mercado y cumple con los altos estándares de fiabilidad de la producción.
Los puños de la pinza de botella Air Grip están diseñados en cinco tamaños estándar que cubren la mayor parte del surtido actual de botellas. Estos puños fuertes y robustos aseguran un agarre seguro en los cuellos de las botellas, incluso en aplicaciones de alta velocidad, sin dañar las tapas de rosca.
Esta aplicación se presenta en una celda “Total Solution” de Yaskawa, una solución completa para packaging que integra la última tecnología de todas las divisiones de la compañía: incluye un PLC Yaskawa, variadores de la gama GA700 con conexión bluetooth y capacidad de programación, software Motologix para programar el robot desde diferentes tipos de PLC y robot GP25 de la gama de manipulación GP, el controlador YRC1000, el cual lleva integrado la Unidad de Seguridad Funcional (FSU) que permite controlar hasta 32 posiciones de seguridad para limitar la posición del robot así como su velocidad.
